
 NASA LRO Lunar Image: A Detailed Look at the Walls of Crater Aristarchus
NASA LRO Lunar Image: A Detailed Look at the Walls of Crater Aristarchus
“No wonder planners for the Apollo missions put this plateau high on its list of targets for human exploration. This amazing image was acquired on 10 November 2011 as LRO passed north-to-south about 70 km east of the crater’s center while it was slewed 70 degrees to the west. The spacecraft was only 26 km (16.2 miles) above the surface; about two times lower than normal. For a sense of scale, that altitude is only a little over twice as high as commercial jets fly above the Earth!”
Powerful Pixels: Mapping the Apollo Zone on the Moon

Mosaic of the near side of the moon as taken by the Clementine star trackers. The images were taken on March 15, 1994. Credit: NASA
Grayscale pixels – up close, they look like black, white or grey squares. But when you zoom out to see the bigger picture, they can create a digital photograph, like this one of our moon: For NASA researchers, pixels are much more – they are precious data that help us understand where we came from, where we’ve been, and where we’re going.
At NASA’s Ames Research Center, Moffett Field, Calif., computer scientists have made a giant leap forward to pull as much information from imperfect static images as possible. With their advancement in image processing algorithms, the legacy data from the Apollo Metric Camera onboard Apollo 15, 16 and 17 can be transformed into an informative and immersive 3D mosaic map of a large and scientifically interesting part of the moon.
The “Apollo Zone” Digital Image Mosaic (DIM) and Digital Terrain Model (DTM) maps cover about 18 percent of the lunar surface at a resolution of 98 feet (30 meters) per pixel. The maps are the result of three years of work by the Intelligent Robotics Group (IRG) at NASA Ames, and are available to view through the NASA Lunar Mapping and Modeling Portal (LMMP) and Google Moon feature in Google Earth.
“The main challenge of the Apollo Zone project was that we had very old data – scans, not captured in digital format,” said Ara Nefian, a senior scientist with the IRG and Carnegie Mellon University-Silicon Valley. “They were taken with the technology we had over 40 years ago with imprecise camera positions, orientations and exposure time by today’s standards.”
The researchers overcame the challenge by developing new computer vision algorithms to automatically generate the 2D and 3D maps. Algorithms are sets of computer code that create a procedure for how to handle certain set processes. For example, part of the 2D imaging algorithms align many images taken from various positions with various exposure times into one seamless image mosaic. In the mosaic, areas in shadows, which show up as patches of dark or black pixels are automatically replaced by lighter gray pixels. These show more well-lit detail from other images of the same area to create a more detailed map.

Left: A normal one-camera image of the lunar surface. Right: A composite Apollo Zone image showing the best details from multiple photographs. Credit: NASA/Google Earth
“The key innovation that we made was to create a fully automatic image mosaicking and terrain modeling software system for orbital imagery,” said Terry Fong, director of IRG. “We have since released this software in several open-source libraries including Ames Stereo Pipeline, Neo-Geography Toolkit and NASA Vision Workbench.”
Lunar imagery of varying coverage and resolution has been released for general use for some time. In 2009, the IRG helped Google develop “Moon in Google Earth”, an interactive, 3D atlas of the moon. With “Moon in Google Earth”, users can explore a virtual moonscape, including imagery captured by the Apollo, Clementine and Lunar Orbiter missions.
The Apollo Zone project uses imagery recently scanned at NASA’s Johnson Space Center in Houston, Texas, by a team from Arizona State University. The source images themselves are large – 20,000 pixels by 20,000 pixels, and the IRG aligned and processed more than 4,000 of them. To process the maps, they used Ames’ Pleiades supercomputer.
The initial goal of the project was to build large-scale image mosaics and terrain maps to support future lunar exploration. However, the project’s progress will have long-lasting technological impacts on many targets of future exploration.
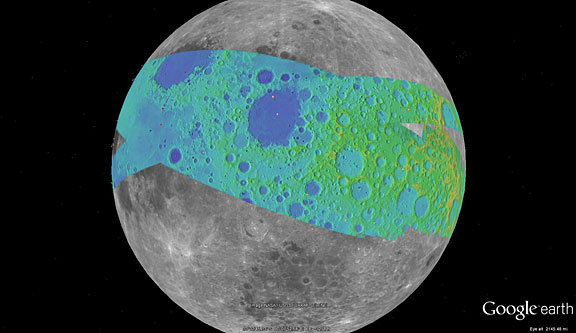
The color on this map represents the terrain elevation in the Apollo Zone mapped area. Credit: NASA/Google Earth
“The algorithms are very complex, so they don’t yet necessarily apply to things like real time robotics, but they are extremely precise and accurate,” said Nefian. “It’s a robust technological solution to deal with insufficient data, and qualities like this make it superb for future exploration, such as a reconnaissance or mapping mission to a Near Earth Object.”
Near Earth Objects, or “NEOs” are comets and asteroids that have been attracted by the gravity of nearby planets into orbits in Earth’s neighborhood. NEOs are often small and irregular, which makes their paths hard to predict. With these algorithms, even imperfect imagery of a NEO could be transformed into detailed 3D maps to help researchers better understand the shape of it, and how it might travel while in our neighborhood.
In the future, the team plans to expand the use of their algorithms to include imagery taken at angles, rather than just straight down at the surface. A technique called photoclinometry – or “shape from shading” – allows 3D terrain to be reconstructed from a single 2D image by comparing how surfaces sloping toward the sun appear brighter than areas that slope away from it. Also, the team will study imagery not just as pictures, but as physical models that give information about all the factors affect how the final image is depicted.
“As NASA continues to build technologies that will enable future robotic and human exploration, our researchers are looking for new and clever ways to get more out of the data we capture,” said Victoria Friedensen, Joint Robotic Precursor Activities manager of the Human Exploration Operations Mission Directorate at NASA Headquarters. “This technology is going to have great benefit for us as we take the next steps.”
This work was funded by NASA’s LMMP, and supported by collaborators at NASA’s Marshall Space Flight Center, Huntsville, Alabama, NASA’s Goddard Space Flight Center, Greenbelt, Maryland, NASA’s Jet Propulsion Laboratory, Pasadena, Calif. and the United States Geological Survey (USGS).
To view the maps, visit the LMMP site or view in Google Earth:
1. Download Google Earth at: http://earth.google.com
2. Click here to download a KML file for viewing in Google Earth: http://byss.ndc.nasa.gov/stereopipeline/dataviz/apollo_metric.kml
3. Once you open that file in Google Earth you will have options to view these “Apollo Zone” maps overlaid on Google Earth’s “Moon mode”.
Jessica Culler, 650-604-4789
Ames Research Center, Moffett Field, Calif.
Restoring Instant Analog Photographic Technology
 The five Lunar Orbiter missions took photographs of the Moon and processed them – on film – in lunar orbit – via a chemical process developed by Eastman Kodak – one that is somewhat similar to Polaroid’s instant film products. The developed images were scanned and sent back to Earth and stored as analog data. After the missions were completed the tapes and rives were stored and then forgotten. A generation later, in 2008, the Lunar Orbiter Image Recovery Project (LOIRP) re-engineered the original tape drives and re-processed the original mission analog data tapes – using 21st Century processing capabilities to produce dramatically enhanced versions of these iconic and historic images. We wholeheartedly believe that there are new things than can be learned from old stuff. As such, when we learned of this effort to save – and continue – the Polaroid analog image process (Kodak’s competitor), well, we had to support it.
The five Lunar Orbiter missions took photographs of the Moon and processed them – on film – in lunar orbit – via a chemical process developed by Eastman Kodak – one that is somewhat similar to Polaroid’s instant film products. The developed images were scanned and sent back to Earth and stored as analog data. After the missions were completed the tapes and rives were stored and then forgotten. A generation later, in 2008, the Lunar Orbiter Image Recovery Project (LOIRP) re-engineered the original tape drives and re-processed the original mission analog data tapes – using 21st Century processing capabilities to produce dramatically enhanced versions of these iconic and historic images. We wholeheartedly believe that there are new things than can be learned from old stuff. As such, when we learned of this effort to save – and continue – the Polaroid analog image process (Kodak’s competitor), well, we had to support it.
According to Wikipedia:
“Polaroid Corporation is an American-based international consumer electronics and eyewear company, originally founded in 1937 by Edwin H. Land. It is most famous for its instant film cameras, which reached the market in 1948, and continued to be the company’s flagship product line until the February 2008 decision to cease all production in favor of digital photography products.[1] The company’s original dominant market was in polarized sunglasses, an outgrowth of Land’s self-guided research in polarization after leaving Harvard University after his freshman year—he later returned to Harvard to continue his research.”
According to the project’s website:
“We’re always dreaming about making the impossible possible and lately we can’t stop thinking about a new Impossible camera. We envision a high quality camera that is optimized to make the best out of our new, constantly improving film materials.
Therefore we have now started the Impossible Camera Project. Together with a small team of real analog camera experts, amongst others long time Polaroid camera expert Henny Waanders, we are currently evaluating and researching all possible and impossible possibilities regarding the production of a new analog instant camera.
Our idol is the legendary Polaroid SX 70 camera. Discontinued more than 30 years ago, this Polaroid cam is one of the most wanted instant cameras worldwide. The reasons are obvious: the high quality lens combined with the revolutionary folding design and the premium materials are simply irresistible. In 1972 this camera was simply the revolution and it changed the world of photography taking hearts in storm. Since today the SX-70 has not lost anything of its magic and it is still our hero as well as inspiration in all undertaking towards an Impossible camera.
Stay tuned to learn more as soon as things evolve.”
According to ITT (which bought Kodak):
“Photos were processed automatically by the Orbiter’s photographic system as the spacecraft orbited the Moon’s dark side. This operation was performed by a KODAK BITMAT diffusion transfer process using ‘dry’ chemistry. A high-intensity light beam then optically scanned the photographic prints, and the images were transmitted to receiving stations on Earth.”
Additional information
Apollo 15 Landing Site In Great Detail
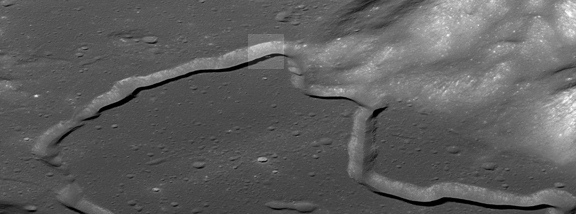
The NASA Lunar Reconnaissance Orbiter rolled to capture this dramatic oblique view of the Apollo 15 landing site. Hadley rille, a great chasm in the lunar surface, carves its way through the center of this scene [NASA/GSFC/Arizona State University]. Larger Image.
{kind=link}

LOIRP: Back in the Saddle Again

After being on hiatus for a few months the Lunar Orbiter Image Recovery Project (LOIRP) will soon be back in action retrieving imagery from original Lunar Orbiter program data tapes and vintage tape drives that we have restored and enhanced. Armed with new software that will greatly enhance our image recovery process and other improvements, we should be able to produce new versions of original Lunar Orbiter imagery on a regular basis. Of course, we’ll be posting all of it here.
Apollo Zone Digital Image Mosaic and Digital Elevation Model Released
 The “Apollo Zone” Digital Image Mosaic (DIM) and Digital Elevation Model (DEM) have just been released. These maps cover approx. 18% of the Lunar surface at a resolution of 1024 pixels per degree (approx 30 m/pixel). The maps are the result of 3 years worth of work by the ARC Intelligent Robotics Group (IRG) to align and process more than 4,000 images from the Apollo Metric (Mapping) Camera, which flew aboard Apollo 15, 16, and 17.
The “Apollo Zone” Digital Image Mosaic (DIM) and Digital Elevation Model (DEM) have just been released. These maps cover approx. 18% of the Lunar surface at a resolution of 1024 pixels per degree (approx 30 m/pixel). The maps are the result of 3 years worth of work by the ARC Intelligent Robotics Group (IRG) to align and process more than 4,000 images from the Apollo Metric (Mapping) Camera, which flew aboard Apollo 15, 16, and 17.
To preview the “Apollo Zone” maps, download the following KML file for viewing in Google Earth :
Once you open that file in Google Earth you will have options to view these “Apollo Zone” maps overlaid on Google Earth’s “Moon mode”. The maps have also been uploaded to the Lunar Mapping and Modeling Project (LMMP) portal (http://lmmp.nasa.gov) and will soon be available for visualization and download via that site.
The “Apollo Zone” maps cover the following sites of interest: Apollo 15, Apollo 16, Alphonsus Crater, Rima Prinz, Aristarchus Plateau-2, Ina D Caldera, Sulpicius Gallus, Mare Crisium, Mare Smythii, King Crater, Tsiolkovskiy Crater, Aitken Crater, and half of Van de Graaf Crater.
The terrain model has an average vertical accuracy of 40 m/pixel and standard deviation of 37 m (compared to LOLA laser altimetry tracks). Over 46% of the covered surface has vertical errors lower than 25 m.
The “Apollo Zone” maps (image, elevation, hillside, colorshade, confidence and precision) were automatically generated using new computer vision algorithms developed by IRG:
– robust statistical sub-pixel stereo correspondence
– robust bundle adjustment and radiometric corrections for large-scale image mosaics
– orbital camera position/orientation estimation using interest point extraction
– photometric correction of exposure time, shadow removal and generation of seamless large-scale image mosaics.
– photometric method for reconstructing lunar albedo
– photoclinometric terrain reconstruction method that improves lunar DTM precision
– statistical method for multiple stereo digital terrain model mosaicking
– multi-view 3D terrain reconstruction
– DTM/LOLA alignment and lidar / image matching
These algorithms have been released as NASA open-source (Ames Stereo Pipeline, Neo-Geography Toolkit, and NASA Vision Workbench). Map processing was performed using the NASA Pleiades supercomputer. In addition to the Apollo Metric Camera images, the fully automatic map processing pipeline has also been used with data from the Lunar Reconnaissance Orbiter Camera (LROC) and by several planetary science groups.
This work was funded by the Lunar Mapping and Modeling Project (LMMP). We gratefully acknowledge the support of our collaborators at NASA MSFC, NASA GSFC, JPL and USGS. Special thanks go to Ray French and Mark Nall for their support and leadership of LMMP.
Posted by: Soderman/NLSI Staff
LRO Image: Hadley Rille and the Mountains of the Moon

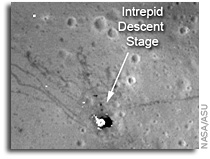
On 20 July 2011 (coincidentally, the 42nd anniversary of the first steps humans took on another world) the NASA Lunar Reconnaissance Orbiter was commanded to roll to the east, allowing the Lunar Reconnaissance Orbiter Camera to obliquely observe Hadley rille and the Apollo 15 landing site. One of humanity’s greatest voyages of exploration, the adventures of mission commander David Scott, lunar module pilot James Irwin, and command module pilot Al Worden transformed our understanding of the Moon and the Solar System. The shadow of the descent stage of the Lunar Module Falcon is visible, as is that of NASA’s first lunar roving vehicle. Additionally, the sampling stations explored by the Apollo 15 astronauts are easy to pick out.
Apollo 15 was the first of three long-duration “J-missions”; more would have flown had the Apollo program not been brought to a premature conclusion in 1972 after the Apollo 17 mission. The J-missions featured heavily instrumented command and service modules, improved spacesuits to promote crew agility, upgraded lunar landing vehicles, and the electric Lunar Roving Vehicles (or LRVs) to expand the crew’s range on the surface.
Prior to the mission, the Apollo 15 crew received extensive geoscience training, which (along with the increasingly capable hardware) resulted in an extraordinary bounty of scientific results. Apollo 15 was also the only lunar mission where all crewmembers were graduates of the University of Michigan and United States Air Force officers (the lunar module, Falcon, was named after the mascot of the United States Air Force Academy, and the Apollo 15 command module Endeavour is now on permanent display at the National Museum of the U. S. Air Force in Dayton, OH).
Astronauts Scott and Irwin spent almost three days exploring the Hadley-Apennine valley, traversed over 28 kilometers (17 miles) using the first lunar rover, and collected over 77 kilograms (170 pounds) of priceless lunar materials, including the famous “Genesis Rock”, a piece of the primordial lunar crust. While Scott and Irwin explored the surface, command module pilot Worden used the extensive instrument suite aboard the command module Endeavour to successfully complete a complex series of orbital observations.
You can view digital scans of the original Apollo 15 flight films taken by Endeavour’s Fairchild Mapping Camera at the Arizona State University Apollo Digital Image Archive! The geologically complex Apollo 15 site is a high priority target for future human lunar exploration, and consequently was one of the Constellation Regions of Interest that were a focus of LROC observations during the LRO Exploration Systems Mission Directorate mission (the 1st year of LRO operations). Thanks to the exploration of the Apollo 15 astronauts, we now have a well-defined set of scientific questions that can only be addressed through a future human sortie mission to the Hadley-Apennine region. In addition, recovering materials from the descent stage of Falcon would provide valuable information to present-day engineers about how materials survive on the lunar surface for long periods of time.
More information about this image
Moon Geology and a New Mystery on Mars’ Forgotten Plains

NASA Lunar Orbiter 5 image of the plateau west-northwest of Marius crater on the Moon. Larger Image.
One of the supposedly best understood and least interesting landscapes on Mars is hiding something that could rewrite the planet’s history. Or not. In fact, about all that is certain is that decades of assumptions regarding the wide, flat Hesperia Planum are not holding up very well under renewed scrutiny with higher-resolution, more recent spacecraft data.
“Most scientists don’t want to work on the flat things,” noted geologist Tracy Gregg of The University at Buffalo, State University of New York. So, after early Mars scientists decided Hesperia Planum looked like a lava-filled plain, no one really revisited the matter and the place was used to exemplify something rather important: The base of a major transitional period in the geologic time scale of Mars. The period is aptly called the Hesperian and it is thought to have run from 3.7 to 3.1 billion years ago.
But when Gregg and her student Carolyn Roberts started looking at this classic Martian lava plain with modern data sets, they ran into trouble.
“There’s a volcano in Hesperia Planum that not many people pay attention to because it’s very small,” Gregg said. “As I started looking closer at the broader region — I can’t find any other volcanic vents, any flows. I just kept looking for evidence of lava flows. It’s kind of frustrating. There is nothing like that in the Hesperia Planum.”
“A likely cause of this trouble is the thick dust that blankets Hesperia Planum,” she said. “It covers everywhere like a snowfall.”
So she turned her attention to what could be discerned on Hesperia Planum: about a dozen narrow, sinuous channels, called rilles, just a few hundred meters wide and up to hundreds of kilometers long. These rilles have no obvious sources or destinations and it is not at all clear they are volcanic.

NASA/GSFC/Arizona State University Lunar Reconnaissance Orbiter image “Secrets of Schroeteri” Vallis Schroeteri is a sinuous rille on the moon; its inner rille diverges from the primary rille near arrow. Larger Image.

THEMIS daytime infrared image mosaic (courtesy of ASU/NASA/JPL) of Mars with north is at the top. Image is centered at 116.3 deg E and 25.0 deg S Larger Image. “The question I have is what made the channels,”; said Gregg. Was it water, lava, or something else? “There are some lavas that can be really, really runny. And both are liquids that run downhill.” So either is a possibility.
To begin to sort the matter out, Gregg and Roberts are now looking for help on the Moon. Their preliminary findings will be presented Wednesday, 12 Oct., at the meeting of The Geological Society of America in Minneapolis.
“On the Moon we see these same kinds of features and we know that water couldn’t have formed them there,” Gregg said. So they are in the process of comparing channels on the Moon and Mars, using similar data sets from different spacecraft, to see if that sheds any light on the matter. She hopes to find evidence that will rule out water or lava on Hesperia Planum.
“Everybody assumed these were huge lava flows,” said Gregg. “But if it turns out to be a lake deposit, it’s a very different picture of what Mars was doing at that time.” It would also make Hesperia Planum a good place to look for life, because water plus volcanic heat and minerals is widely believed to be a winning combination for getting life started.
“The ‘volcanic’ part is an interpretation that’s beginning to fall apart,” said Gregg. “What is holding up is that the Hesperian marks a transition between the Noachian (a time of liquid water on the surface and the formation of lots of impact craters) and the Amazonian (a drier, colder Mars).”
She has found that other scientists are interested in her work because of its possible implications on the Mars geological time scale. Gregg is not worried that Mars history will need to be rewritten, but she does suspect that Hesperia Planum is a lot more complicated than people has long thought.
Presentation Time: 3-3:15 PM, Wed., 12 Oct. 2011 Where: Minneapolis Convention Center, Room L100H-J What: 284-6: Sinuous Rilles in Hisperia Planum, Mars: Water, Lava, or Something Else?
Session No. 284: Terrestrial Analogs in Solar System Studies
LPI Lunar Exploration Summer Intern Program
 LPI Lunar Exploration Summer Intern Program
LPI Lunar Exploration Summer Intern Program
“To help integrate those science priorities with NASA’s exploration program, the Lunar and Planetary Institute (LPI) is hosting a special summer intern program to evaluate possible landing sites for robotic and human exploration missions. Two teams of students will work with LPI science staff and other collaborators to evaluate the best landing sites to address each of the NRC’s science priorities. This will be a unique team activity that should foster extensive discussions among students and senior science team members. This Lunar Exploration Summer Intern Program will operate parallel with LPI’s regular summer intern program.”
LRO Imagery Helps Locate Titanium on the Moon
 Subtly Shaded Map of the Moon Reveals Titanium Treasure Troves
Subtly Shaded Map of the Moon Reveals Titanium Treasure Troves
“A map of the Moon combining observations in visible and ultraviolet wavelengths shows a treasure trove of areas rich in titanium ores. Not only is titanium a valuable element, it is key to helping scientists unravel the mysteries of the Moon’s interior. Mark Robinson and Brett Denevi will be presenting the results from the Lunar Reconnaissance Orbiter mission today at the joint meeting of the European Planetary Science Congress and the American Astronomical Society’s Division for Planetary Sciences.”
Luna 3 And the Far Side of the Moon
 Oct. 7, 1959: Luna 3’s Images From the Dark Side, Wired
Oct. 7, 1959: Luna 3’s Images From the Dark Side, Wired
“Luna 3’s mission objective was to provide the first photographs from the moon’s far side. To achieve this, the probe was equipped with a dual-lens 35mm camera, one a 200mm, f/5.6 aperture, the other a 500mm, f/9.5. The photo sequencing was automatically triggered when Luna 3’s photocell detected the sunlit far side, which occurred when the craft was passing about 40,000 miles above the lunar surface. Luna 3’s camera took 29 photographs over a 40-minute period, covering roughly 70 percent of the moon’s far side. The photographs were developed, fixed and dried by the probe’s onboard film processing unit. Seventeen images were successfully scanned and returned to Earth on Oct. 18, when Luna 3 was in position to begin transmitting.”
![]() Keith’s note: Um, the ‘dark side’ of the Moon is constantly changing as the Moon spins on its axis – once a month. What Luna 3 photographed was the “far side” of the Moon. If the side of the Moon that was photographed by Luna 3 was indeed “dark” then there’d be nothing in the photo, right?
Keith’s note: Um, the ‘dark side’ of the Moon is constantly changing as the Moon spins on its axis – once a month. What Luna 3 photographed was the “far side” of the Moon. If the side of the Moon that was photographed by Luna 3 was indeed “dark” then there’d be nothing in the photo, right?
Lunar Reconnaissance Orbiter Images Offer Sharper Views of Apollo Landing Sites
 NASA’s Lunar Reconnaissance Orbiter (LRO) captured the sharpest images ever taken from space of the Apollo 12, 14 and 17 landing sites. Images show the twists and turns of the paths made when the astronauts explored the lunar surface. At the Apollo 17 site, the tracks laid down by the lunar rover are clearly visible, along with the last foot trails left on the moon. The images also show where the astronauts placed some of the scientific instruments that provided the first insight into the moon’s environment and interior.” More
NASA’s Lunar Reconnaissance Orbiter (LRO) captured the sharpest images ever taken from space of the Apollo 12, 14 and 17 landing sites. Images show the twists and turns of the paths made when the astronauts explored the lunar surface. At the Apollo 17 site, the tracks laid down by the lunar rover are clearly visible, along with the last foot trails left on the moon. The images also show where the astronauts placed some of the scientific instruments that provided the first insight into the moon’s environment and interior.” More
– Lunar Orbiter Image Recovery Project (LOIRP) Releases New Image of Apollo 12/Surveyor III Landing Site, earlier post
– Lunar Orbiter Image Recovery Project (LOIRP) Releases New High Resolution Image of The Apollo 14 Landing Site With EVA Details, earlier post
– Damaged Tape and Murky Moon Views (Apollo 11), earlier post
– LOIRP Mentioned at Apollo 11 Anniversary Celebration, earlier post