
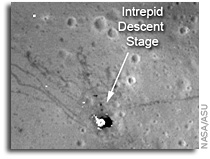
 The Apollo 15 Lunar Module (LM) Falcon set down on the Hadley plains (26.132*N, 3.634*E) a mere 2 kilometers from Hadley Rille. The goals: sample the basalts that compose the mare deposit, explore a lunar rille for the first time, and search for ancient crustal rocks. Additionally, Dave Scott and Jim Irwin deployed the third Apollo Lunar Surface Experiments Package (ALSEP) and unveiled the first Lunar Roving Vehicle (LRV). The ALSEP consisted of several experiments that were powered by a Radioisotope Thermoelectric Generator (RTG) and sent back valuable scientific data to the Earth for over six years after the astronauts left. This new LROC NAC image taken from low altitude shows the hardware and tracks in even more detail.
The Apollo 15 Lunar Module (LM) Falcon set down on the Hadley plains (26.132*N, 3.634*E) a mere 2 kilometers from Hadley Rille. The goals: sample the basalts that compose the mare deposit, explore a lunar rille for the first time, and search for ancient crustal rocks. Additionally, Dave Scott and Jim Irwin deployed the third Apollo Lunar Surface Experiments Package (ALSEP) and unveiled the first Lunar Roving Vehicle (LRV). The ALSEP consisted of several experiments that were powered by a Radioisotope Thermoelectric Generator (RTG) and sent back valuable scientific data to the Earth for over six years after the astronauts left. This new LROC NAC image taken from low altitude shows the hardware and tracks in even more detail.
The LRV, a lunar “dune buggy”, allowed the astronauts to traverse far from the LM and explore much more local geology than the astronauts on previous missions (Apollo 11, 12, 14). Not only did the LRV allow the astronauts to move from place-to-place at a lively rate of eight to sixteen kilometers per hour (five to ten miles per hour), but the LRV also allowed brief periods of rest that in turn helped to conserve oxygen.
The LRV wheels were 82 centimeters (32 inches) in diameter, and 23 centimeters (9 inches) wide. Typically LROC NAC pixels are about 50 centimeters square, so it is not always easy to pick out the LRV tracks. In previous LROC images, the LRV tracks are usually only visible near the LM where the descent engine exhaust plume disturbed the surface. The LRV wheels broke through the changed surface and thus the tracks have more contrast near the LM.
For two one-month periods last year (2011), the LRO orbit was lowered such that overflights of the Apollo sites were only 25 to 30 kilometers, rather than the usual 50 kilometers. These low passes resulted in NAC pixel scales near 25 centimeters! LRO has a ground speed of a bit over 1600 meters (5249 feet) per second, and the shortest NAC exposure time is 0.34 millseconds, so images taken from this low altitude are smeared down track a bit. However, the smear is hardly noticeable and features at the Apollo sites definitely come into sharper focus. In this new low-altitude NAC image of the LRV, tracks are visible about half of the time, usually when the tracks are at an angle to the Sun direction, rather than parallel.
More
Technoarchaeology: Learning New Things from Old Technology
 Technologies that we’ve lost – and the quest to find them again, io9
Technologies that we’ve lost – and the quest to find them again, io9
“I asked NASA Watch’s Keith Cowing about this, and he explained that this is just an urban legend. The schematics are all still around, mostly on microfiche, and any ancient computer files just hold images of the original plans as opposed to now unreadably obsolete data. Still, while the knowledge wasn’t lost, it was certainly forgotten, and worse, it was badly organized. As Cowing – himself working on the rediscovery of old NASA documents with the Lunar Orbiter Image Recovery Project – told me, all this archival information was basically abandoned until NASA’s started working on the Constellation program last decade, and now that that project has been forgotten the information is again beginning to gather dust. If there is a point of disconnect, it’s more in terms of how we understand the information and the different ways in which we approach science forty-five years on:”
“If anything’s missing, it’s actually more the explanation. I mean there is some stuff that will never be found again, but it’s all there, and the stuff that isn’t you can sort of figure out backwards. Sometimes you need the equivalent of a Rosetta Stone, because sometimes the way we think today is not the way they thought back then. Sometimes you need an index or a document that explains how they did things or their nomenclature. That’s the one thing that’s sometimes hard to find is what I call a bridge document, an answer guide to how they did the thing back in the sixties. There’s no FAQ.”
Buzz Aldrin Visits Lunar Orbiter Image Recovery Project

On 6 January 2012, Apollo 11 astronaut Buzz Aldrin visited the Lunar Orbiter Image Recovery Project (LOIRP) located at Building 596 aka “McMoons” at the NASA Ames Research Park at Moffett Field, CA. Pictured (L to R): LOIRP Engineer Ken Zin, LOIRP Co-Lead Dennis Wingo, LOIRP Student Intern Neulyn Moss, Buzz Aldrin, LOIRP Image Specialist Austin Epps. Behind them is the FR-900 Tape drive restored and enhanced by LOIRP to play back the original analog data tapes generated by the five Lunar Orbiter missions in the 1960s. Larger image

Buzz Aldrin takes a moment to autograph our FR-900 tape drive. Larger image
LRO’s Stunning View of Aristarchus
 NASA LRO Lunar Image: A Detailed Look at the Walls of Crater Aristarchus
NASA LRO Lunar Image: A Detailed Look at the Walls of Crater Aristarchus
“No wonder planners for the Apollo missions put this plateau high on its list of targets for human exploration. This amazing image was acquired on 10 November 2011 as LRO passed north-to-south about 70 km east of the crater’s center while it was slewed 70 degrees to the west. The spacecraft was only 26 km (16.2 miles) above the surface; about two times lower than normal. For a sense of scale, that altitude is only a little over twice as high as commercial jets fly above the Earth!”
Powerful Pixels: Mapping the Apollo Zone on the Moon

Mosaic of the near side of the moon as taken by the Clementine star trackers. The images were taken on March 15, 1994. Credit: NASA
Grayscale pixels – up close, they look like black, white or grey squares. But when you zoom out to see the bigger picture, they can create a digital photograph, like this one of our moon: For NASA researchers, pixels are much more – they are precious data that help us understand where we came from, where we’ve been, and where we’re going.
At NASA’s Ames Research Center, Moffett Field, Calif., computer scientists have made a giant leap forward to pull as much information from imperfect static images as possible. With their advancement in image processing algorithms, the legacy data from the Apollo Metric Camera onboard Apollo 15, 16 and 17 can be transformed into an informative and immersive 3D mosaic map of a large and scientifically interesting part of the moon.
The “Apollo Zone” Digital Image Mosaic (DIM) and Digital Terrain Model (DTM) maps cover about 18 percent of the lunar surface at a resolution of 98 feet (30 meters) per pixel. The maps are the result of three years of work by the Intelligent Robotics Group (IRG) at NASA Ames, and are available to view through the NASA Lunar Mapping and Modeling Portal (LMMP) and Google Moon feature in Google Earth.
“The main challenge of the Apollo Zone project was that we had very old data – scans, not captured in digital format,” said Ara Nefian, a senior scientist with the IRG and Carnegie Mellon University-Silicon Valley. “They were taken with the technology we had over 40 years ago with imprecise camera positions, orientations and exposure time by today’s standards.”
The researchers overcame the challenge by developing new computer vision algorithms to automatically generate the 2D and 3D maps. Algorithms are sets of computer code that create a procedure for how to handle certain set processes. For example, part of the 2D imaging algorithms align many images taken from various positions with various exposure times into one seamless image mosaic. In the mosaic, areas in shadows, which show up as patches of dark or black pixels are automatically replaced by lighter gray pixels. These show more well-lit detail from other images of the same area to create a more detailed map.

Left: A normal one-camera image of the lunar surface. Right: A composite Apollo Zone image showing the best details from multiple photographs. Credit: NASA/Google Earth
“The key innovation that we made was to create a fully automatic image mosaicking and terrain modeling software system for orbital imagery,” said Terry Fong, director of IRG. “We have since released this software in several open-source libraries including Ames Stereo Pipeline, Neo-Geography Toolkit and NASA Vision Workbench.”
Lunar imagery of varying coverage and resolution has been released for general use for some time. In 2009, the IRG helped Google develop “Moon in Google Earth”, an interactive, 3D atlas of the moon. With “Moon in Google Earth”, users can explore a virtual moonscape, including imagery captured by the Apollo, Clementine and Lunar Orbiter missions.
The Apollo Zone project uses imagery recently scanned at NASA’s Johnson Space Center in Houston, Texas, by a team from Arizona State University. The source images themselves are large – 20,000 pixels by 20,000 pixels, and the IRG aligned and processed more than 4,000 of them. To process the maps, they used Ames’ Pleiades supercomputer.
The initial goal of the project was to build large-scale image mosaics and terrain maps to support future lunar exploration. However, the project’s progress will have long-lasting technological impacts on many targets of future exploration.
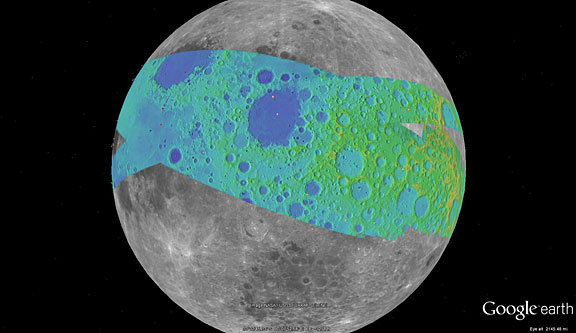
The color on this map represents the terrain elevation in the Apollo Zone mapped area. Credit: NASA/Google Earth
“The algorithms are very complex, so they don’t yet necessarily apply to things like real time robotics, but they are extremely precise and accurate,” said Nefian. “It’s a robust technological solution to deal with insufficient data, and qualities like this make it superb for future exploration, such as a reconnaissance or mapping mission to a Near Earth Object.”
Near Earth Objects, or “NEOs” are comets and asteroids that have been attracted by the gravity of nearby planets into orbits in Earth’s neighborhood. NEOs are often small and irregular, which makes their paths hard to predict. With these algorithms, even imperfect imagery of a NEO could be transformed into detailed 3D maps to help researchers better understand the shape of it, and how it might travel while in our neighborhood.
In the future, the team plans to expand the use of their algorithms to include imagery taken at angles, rather than just straight down at the surface. A technique called photoclinometry – or “shape from shading” – allows 3D terrain to be reconstructed from a single 2D image by comparing how surfaces sloping toward the sun appear brighter than areas that slope away from it. Also, the team will study imagery not just as pictures, but as physical models that give information about all the factors affect how the final image is depicted.
“As NASA continues to build technologies that will enable future robotic and human exploration, our researchers are looking for new and clever ways to get more out of the data we capture,” said Victoria Friedensen, Joint Robotic Precursor Activities manager of the Human Exploration Operations Mission Directorate at NASA Headquarters. “This technology is going to have great benefit for us as we take the next steps.”
This work was funded by NASA’s LMMP, and supported by collaborators at NASA’s Marshall Space Flight Center, Huntsville, Alabama, NASA’s Goddard Space Flight Center, Greenbelt, Maryland, NASA’s Jet Propulsion Laboratory, Pasadena, Calif. and the United States Geological Survey (USGS).
To view the maps, visit the LMMP site or view in Google Earth:
1. Download Google Earth at: http://earth.google.com
2. Click here to download a KML file for viewing in Google Earth: http://byss.ndc.nasa.gov/stereopipeline/dataviz/apollo_metric.kml
3. Once you open that file in Google Earth you will have options to view these “Apollo Zone” maps overlaid on Google Earth’s “Moon mode”.
Jessica Culler, 650-604-4789
Ames Research Center, Moffett Field, Calif.
Apollo 15 Landing Site In Great Detail
The NASA Lunar Reconnaissance Orbiter rolled to capture this dramatic oblique view of the Apollo 15 landing site. Hadley rille, a great chasm in the lunar surface, carves its way through the center of this scene [NASA/GSFC/Arizona State University]. Larger Image.
{kind=link}

Apollo Zone Digital Image Mosaic and Digital Elevation Model Released
 The “Apollo Zone” Digital Image Mosaic (DIM) and Digital Elevation Model (DEM) have just been released. These maps cover approx. 18% of the Lunar surface at a resolution of 1024 pixels per degree (approx 30 m/pixel). The maps are the result of 3 years worth of work by the ARC Intelligent Robotics Group (IRG) to align and process more than 4,000 images from the Apollo Metric (Mapping) Camera, which flew aboard Apollo 15, 16, and 17.
The “Apollo Zone” Digital Image Mosaic (DIM) and Digital Elevation Model (DEM) have just been released. These maps cover approx. 18% of the Lunar surface at a resolution of 1024 pixels per degree (approx 30 m/pixel). The maps are the result of 3 years worth of work by the ARC Intelligent Robotics Group (IRG) to align and process more than 4,000 images from the Apollo Metric (Mapping) Camera, which flew aboard Apollo 15, 16, and 17.
To preview the “Apollo Zone” maps, download the following KML file for viewing in Google Earth :
Once you open that file in Google Earth you will have options to view these “Apollo Zone” maps overlaid on Google Earth’s “Moon mode”. The maps have also been uploaded to the Lunar Mapping and Modeling Project (LMMP) portal (http://lmmp.nasa.gov) and will soon be available for visualization and download via that site.
The “Apollo Zone” maps cover the following sites of interest: Apollo 15, Apollo 16, Alphonsus Crater, Rima Prinz, Aristarchus Plateau-2, Ina D Caldera, Sulpicius Gallus, Mare Crisium, Mare Smythii, King Crater, Tsiolkovskiy Crater, Aitken Crater, and half of Van de Graaf Crater.
The terrain model has an average vertical accuracy of 40 m/pixel and standard deviation of 37 m (compared to LOLA laser altimetry tracks). Over 46% of the covered surface has vertical errors lower than 25 m.
The “Apollo Zone” maps (image, elevation, hillside, colorshade, confidence and precision) were automatically generated using new computer vision algorithms developed by IRG:
– robust statistical sub-pixel stereo correspondence
– robust bundle adjustment and radiometric corrections for large-scale image mosaics
– orbital camera position/orientation estimation using interest point extraction
– photometric correction of exposure time, shadow removal and generation of seamless large-scale image mosaics.
– photometric method for reconstructing lunar albedo
– photoclinometric terrain reconstruction method that improves lunar DTM precision
– statistical method for multiple stereo digital terrain model mosaicking
– multi-view 3D terrain reconstruction
– DTM/LOLA alignment and lidar / image matching
These algorithms have been released as NASA open-source (Ames Stereo Pipeline, Neo-Geography Toolkit, and NASA Vision Workbench). Map processing was performed using the NASA Pleiades supercomputer. In addition to the Apollo Metric Camera images, the fully automatic map processing pipeline has also been used with data from the Lunar Reconnaissance Orbiter Camera (LROC) and by several planetary science groups.
This work was funded by the Lunar Mapping and Modeling Project (LMMP). We gratefully acknowledge the support of our collaborators at NASA MSFC, NASA GSFC, JPL and USGS. Special thanks go to Ray French and Mark Nall for their support and leadership of LMMP.
Posted by: Soderman/NLSI Staff
Lunar Reconnaissance Orbiter Images Offer Sharper Views of Apollo Landing Sites
 NASA’s Lunar Reconnaissance Orbiter (LRO) captured the sharpest images ever taken from space of the Apollo 12, 14 and 17 landing sites. Images show the twists and turns of the paths made when the astronauts explored the lunar surface. At the Apollo 17 site, the tracks laid down by the lunar rover are clearly visible, along with the last foot trails left on the moon. The images also show where the astronauts placed some of the scientific instruments that provided the first insight into the moon’s environment and interior.” More
NASA’s Lunar Reconnaissance Orbiter (LRO) captured the sharpest images ever taken from space of the Apollo 12, 14 and 17 landing sites. Images show the twists and turns of the paths made when the astronauts explored the lunar surface. At the Apollo 17 site, the tracks laid down by the lunar rover are clearly visible, along with the last foot trails left on the moon. The images also show where the astronauts placed some of the scientific instruments that provided the first insight into the moon’s environment and interior.” More
– Lunar Orbiter Image Recovery Project (LOIRP) Releases New Image of Apollo 12/Surveyor III Landing Site, earlier post
– Lunar Orbiter Image Recovery Project (LOIRP) Releases New High Resolution Image of The Apollo 14 Landing Site With EVA Details, earlier post
– Damaged Tape and Murky Moon Views (Apollo 11), earlier post
– LOIRP Mentioned at Apollo 11 Anniversary Celebration, earlier post
Searching for Apollo 10’s LEM “Snoopy” In Solar Orbit
 Hunt for Apollo’s lost dog Snoopy, Skymania
Hunt for Apollo’s lost dog Snoopy, Skymania
“Astronomers are teaming up with schools to use robotic telescopes over the internet to scan the night sky and find the spacecraft. The telescopes, part of the Faulkes Telescope Project run by Glamorgan University, are in Hawaii and Australia meaning schools can look with them during normal lesson times in the UK.”
Bill Muehlberger
 Memorial: Bill Muehlberger, University of Teaxs Austin
Memorial: Bill Muehlberger, University of Teaxs Austin
“The Jackson School community mourns the loss of Bill Muehlberger and extend their condolences to his family. He died of natural causes on Wednesday, September 14. An emeritus professor in geology, he taught at the University of Texas at Austin for nearly 40 years before officially retiring in 1992. He also taught geology to multiple generations of NASA astronauts beginning with Apollo.
“Apollo 18”, LOIRP, and Conspiracies
 Apollo 18: A Review And Interview With Technical Advisor Gerry Griffin
Apollo 18: A Review And Interview With Technical Advisor Gerry Griffin
“People’s fascination with space conspiracies has always intrigued me. Facts are irrelevant once someone has made up their mind about something – usually involving the big evil government covering something up – usually evidence of aliens visiting us. I have some personal experience with this via my involvement with the Lunar Orbiter Image Recovery Project (LOIRP) which is being run on a low budget basis outside the gate at NASA Ames Research Center in a McDonalds hamburger joint that closed years ago. The building was free and we were not fussy. With my co-lead Dennis Wingo and a lot of help from NASA and volunteers, we managed to restore images from the original 40+ year analog data tapes at unprecedented resolution when compared to what people saw in the 1960s. More information can be found at the official LOIRP website at https://moonviews.wpenginepowered.com
I bring up LOIRP for one reason: the nature of the original photos and what people imagine they see. Unlike most planetary missions, the Lunar Orbiter probes took their images on conventional film which was chemically processed in lunar orbit, scanned electronically, and the data sent back to Earth by radio. While the automated photo developing process itself was amazing, it had flaws. Often times problems with the chemicals or the gears would leave blobs and strange shapes on the images. ANyone who has spent time looking at the photos knows what I mean.
Well … some people with over active imaginations have concluded that a secret government agency obliterated certain things to keep us from learning the truth (whatever that might be). Secret moon bases I guess. Others see strange shapes which they have decided are bulldozers or cities. What they never bother to check is the scale of these photos. If there were indeed bulldozers on the Moon these Lunar Orbiter photos they’d be 10 miles high.
When we were getting ready to release the images some of the nutty websites got word and came up with all manner of zany conspiracy theories. My favorite was linking the fact that we were doing this in “McDonalds” with “McDonnell Douglas” and some evil dark conspiracy. The fact that they can’t even note the difference in the spelling of these names says a lot. They also made a lot of the fact that ARC’s Center Director is a former USAF Brigadier General. Oh yes, and there is that pirate flag I hung in the window – that didn’t help either.”
NASA Announces Media Teleconference on New Apollo Images
 NASA will host a media teleconference at noon on Tuesday, Sept. 6, to reveal new images of three Apollo landing sites taken from the agency’s Lunar Reconnaissance Orbiter, or LRO. Teleconference participants are:
NASA will host a media teleconference at noon on Tuesday, Sept. 6, to reveal new images of three Apollo landing sites taken from the agency’s Lunar Reconnaissance Orbiter, or LRO. Teleconference participants are:
— Jim Green, director, Planetary Science Division, NASA Headquarters, Washington
— Mark Robinson, principal investigator, Lunar Reconnaissance Orbiter Camera, Arizona State University, Tempe
— Richard Vondrak, LRO project scientist, NASA’s Goddard Space Flight Center, Greenbelt, Md.
To participate in the teleconference, reporters must email Nancy Jones at [email protected] with their name, media affiliation and work telephone number by 10 a.m. on Sept. 6.
Supporting information and visuals for the briefing will be posted at 11:45 a.m. EDT Sept. 6 at: http://www.nasa.gov/lro Audio of the teleconference will be streamed live on the Web at: http://www.nasa.gov/newsaudio